Raspberry PiB+ & Pi2
Raspberry Piを使って、音声命令でキャタピラを操作(3)
キャタピラのコントロールプログラムの設定
次のように設定して、キャタピラのコントロールプログラムをPythonで作成し操作します。
・WiringPiをインストール。
・「julius」、「GPIO」、「jtalk」をつなぐPythonで記述したプログラムを作成。
・プログラムの自動起動を設定。
WiringPiのインストール
RaspberryPiのGPIOピンのコントロールを「WiringPi」を使ってコントロールします。
1.次のコマンドを実行して、WiringPiをインストールします。
$ cd
$ sudo apt-get install git-core
$ git clone git://git.drogon.net/wiringPi
$ cd wiringPi/
$ ./build
2.次のコマンドを実行して、インストールを確認します。
$ gpio -v
バージョン番号が表示されれば、OKです。
Pythonによるプログラム
juliusサーバーから情報を受け取るクライアントを作成します。
「julius」、「GPIO」、「jtalk」をつなぐPythonで記述したプログラム「vremocon.py」を
作成します。
1.次のコマンドを実行して、「vremocon.py」を作成
$ cd
$ nano vremocon.py
2.「vremocon.py」の内容は、次の通りです。
# -*- coding: utf-8 -*-
import socket
import sys
import select
import os
import threading
host = "localhost"
port = 10500
bufsize = 1024
timer_length = 120.0
standby = False
os.system("gpio -g mode 8 out")
os.system("gpio -g mode 7 out")
os.system("gpio -g mode 23 out")
os.system("gpio -g mode 24 out")
os.system("/home/pi/jtalk.sh 音声リモコンを起動しました")
def standbyoff():
global standby
if standby == True:
os.system("/home/pi/jtalk.sh 待機モードを解除します")
standby = False
stop()
def stop():
os.system("gpio -g write 8 0")
os.system("gpio -g write 7 0")
os.system("gpio -g write 23 0")
os.system("gpio -g write 24 0")
client_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
client_socket.connect((host, port))
while True:
inputready, outputready, exceptrdy = select.select([client_socket], [],[])
for s in inputready:
if s == client_socket:
message = client_socket.recv(bufsize)
print "受診したメッセージ : " + message
if message == "":
print 'クライアントの実行を停止します'
break
if standby == True:
if "止まれ" in message:
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh 止まります")
os.system("amixer set Capture cap")
stop()
if "前進" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh 前進します")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 1")
os.system("gpio -g write 7 0")
os.system("gpio -g write 23 1")
os.system("gpio -g write 24 0")
if "後進" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh ばっくします")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 0")
os.system("gpio -g write 7 1")
os.system("gpio -g write 23 0")
os.system("gpio -g write 24 1")
if "左前" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh 前進で左に曲がります")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 0")
os.system("gpio -g write 7 0")
os.system("gpio -g write 23 1")
os.system("gpio -g write 24 0")
if "左後" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh ばっくで左に曲がります")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 0")
os.system("gpio -g write 7 0")
os.system("gpio -g write 23 0")
os.system("gpio -g write 24 1")
if "右前" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh 前進で右に曲がります")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 1")
os.system("gpio -g write 7 0")
os.system("gpio -g write 23 0")
os.system("gpio -g write 24 0")
if "右後" in message:
stop()
os.system("amixer set Capture nocap")
os,system("/home/pi/jtalk.sh ばっくで右に曲がります")
os.system("amixer set Capture cap")
os.system("gpio -g write 8 0")
os.system("gpio -g write 7 1")
os.system("gpio -g write 23 0")
os.system("gpio -g write 24 0")
if "受付モードOFF" in message:
standby = False
os,system("/home/pi/jtalk.sh 待機モードを解除します")
if "受付モードON" in message:
standby = False
os,system("/home/pi/jtalk.sh 既に待機中です")
elif "受付モードON" in message:
os,system("/home/pi/jtalk.sh 待機モードに入ります")
standby = True
t = threading.Timer(timer_length, standbyoff)
t.start()
client_socket.close()
3.次のような操作方法になります。
(1)起動後、メイちゃんが「音声リモコンを起動しました」といいます。
(2)次に「スタンバイ」と言うと、メイちゃんが「待機モードに入ります」と返します。
(3)その後、「前」、「後」、「止まれ」、「右前」、「右後」、「左前」、「左後」と言うと
一旦止まり、
メイちゃんが返事を返して命令通りに動きます。
(4)「ニュートラル」と言うと、「待機モードを解除します」とメイちゃんが返事を返し、
待機モードを解除します。
(5)再度、「スタンバイ」というと(2)のようになります。
(6)待機モードに入ってから2分後に待機モードを自動解除し、モータを停止します。
「julius」と「vremocon.py」の起動
1.次のコマンドを実行して、起動します。
$ julius -C ~/julius/julius.conf &
2.jyuriusが起動後、下図のように表示され止まります。
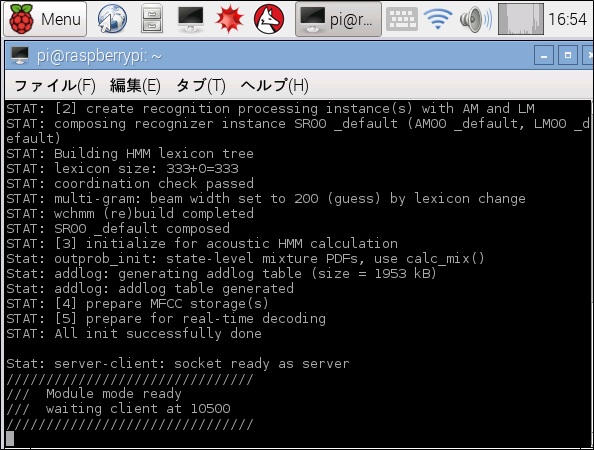
3.Enterキーを押すとプロンプトが表示されます。

4.プロンプトの後に次のコマンドを実行すれば、「vremocon.py」が起動します。
$ python vremocon.py
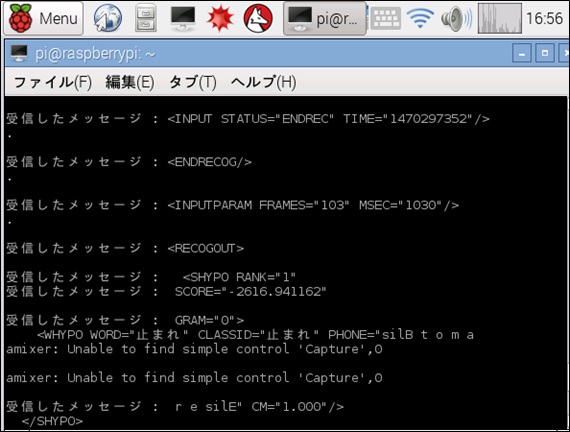
5.しばらくするとメイちゃんが「音声リモコンを起動しました」と言い、
(「julius」と「vremocon.py」の起動の2 )の操作をします。
下図が操作途中の画面です。
6.「Ctrl」+「C」キーを押すと「vremocon.py」のプログラムが停止しプロンプトが表示されます。(下図)
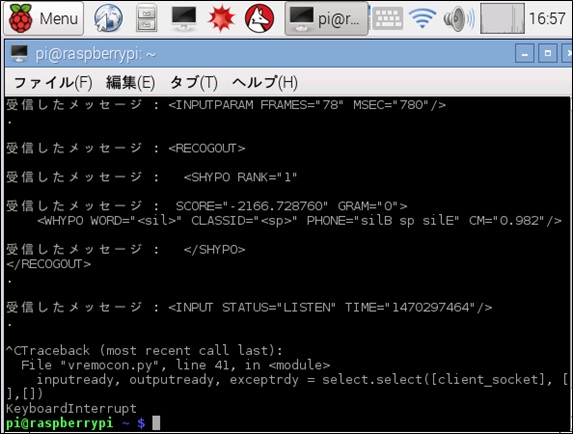
7.「julius」はバックグランドで動いていますので、RaspberryPiのデスクトップ画面でシャットダウンします。
自動起動を設定
RaspberryPi が起動後、自動的に「julius」と「vremocon.py」が起動するように設定します。
1.スクリプトファイル「rc.local」に以下のスクリプトを追加し自動起動できるようにします。
$ sudo nano /etc/rc.local
2.「rc.local」ファイルの内容で、最後の「exit 0」の前に以下の内容を追加し保存します。
su - pi -c 'julius -C /home/pi/julius/julius.conf &'
sleep 10
su - pi -c 'python /home/pi/vremocon.py &'
exit 0
3.RaspberryPi をシャットダウンします。
4.再度、RaspberryPi を起動すると、しばらくしてメイちゃんの声で「音声リモコンを起動しました」
と言います。
5.「スタンバイ」と話しかければ、メイちゃんが「待機モードに入ります」と返します。
(最初は反応が遅いと思います。)
6.「待機モードに入ります」と返事があれば、音声命令を話しかければキャタピラが反応します。
7.待機モードに入ってから何もしないで2分間たつと「待機モードを解除します」とメイちゃんが
返事をします。
8.終了するときは、PCのリモート操作で、RaspberryPi をシャットダウンします。