Otto-Robotを作成
Otto-Robot「PLUS+」(2号機)を作成してみました。
Otto-Robot 「+PLUS」(2号機)について
otto2号機は、タッチセンサーを使い、タッチするたびにottoの動きが変わるようになっています。
1号機と比べて若干サイズが大きくなっています。
以下が、Otto-Roboto「+PLUS」(2号機)の製作過程です。
完成動画
完成したOtto-Robot(2号機)の起動動画です。(長いので途中省略しています。)
タッチするごとに動作が変わります。同じ動作を2回繰り返します。
全部で13種類の動作がプログラムされています。
2号機の特徴
1.16340 充電式リチウム電池充電器シールドボード が使えるようになっています。
(1)下図が出力5vと3.3vで入力4.5v-5.5vの充電式16340リチウムバッテリー充電器シールドモジュールです。
( Aliexpressで購入)


(2)充電中は赤のLEDが点灯し、充電が完了すると緑のLEDが点灯します。
(3)このボードは、Otto-Robotに16340 充電式リチウム電池を装着したまま、充電ができます。
次の写真は、ボディの背面から5Vで充電中です。

2.タッチセンサーを使用
タッチセンサー「TTP223B 1 チャンネルジョグデジタルタッチセンサ静電容量式タッチスイッチモジュール 」
(Aliexpressで購入)を使用しました。
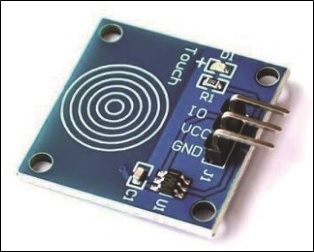
3.タッチセンサーに触るたびに動きが変わります。13種類の動作をします。
各ファイルの取得と組立
1.ottoサイトの「Academy」画面を下にスクロールして「Apply New!」を表示します。
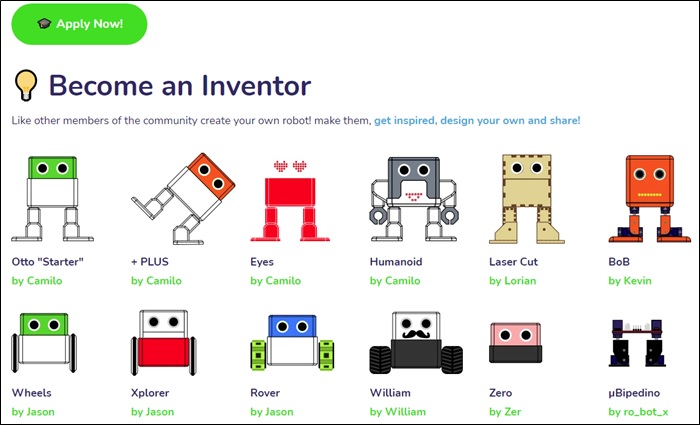
2.画面の「+PLUS」をクリックすると、次のように「Wikifactory」の「Otto DIY+」に移動します。
(1)画面中央の「Files」をクリックすると、必要なファイルが表示されます。
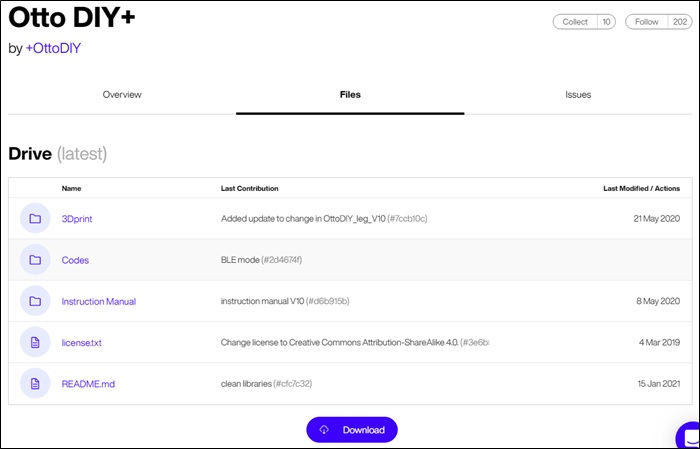
(2)「Download」ボタンをクリックしてファイルをダウンロードします。
(3)ダウンロードしたzipファイルを解凍すると次のフォルダーファイルがあります。
(4)「3Dprint」フォルダーに3Dプリンター用のstlファイルが入っています。
(5)「Code」フォルダーには、プログラムが入っています。
今回スマートフォン(Bluetooth)は使用しません。タッチセンサーのみ使用するので、次のプログラムを
使用します。

これ以外のプログラムは、Bluetooth用のプログラムです。
ただし、このスケッチでは、タッチすると1回の動作しかしませんので、今回はタッチすると
2回同じ動作をするように変更してあります。
(6)「Instruction manual」フォルダーには製作マニュアルと配線図が入っています。
以下が配線図です。
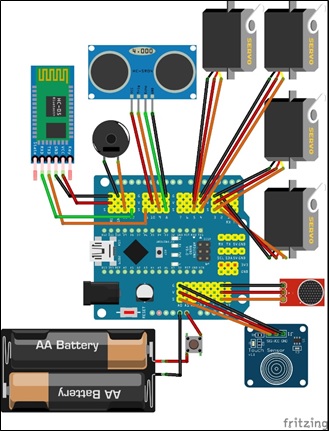
今回は、Bluetoothボードと音センサーは使用していません。
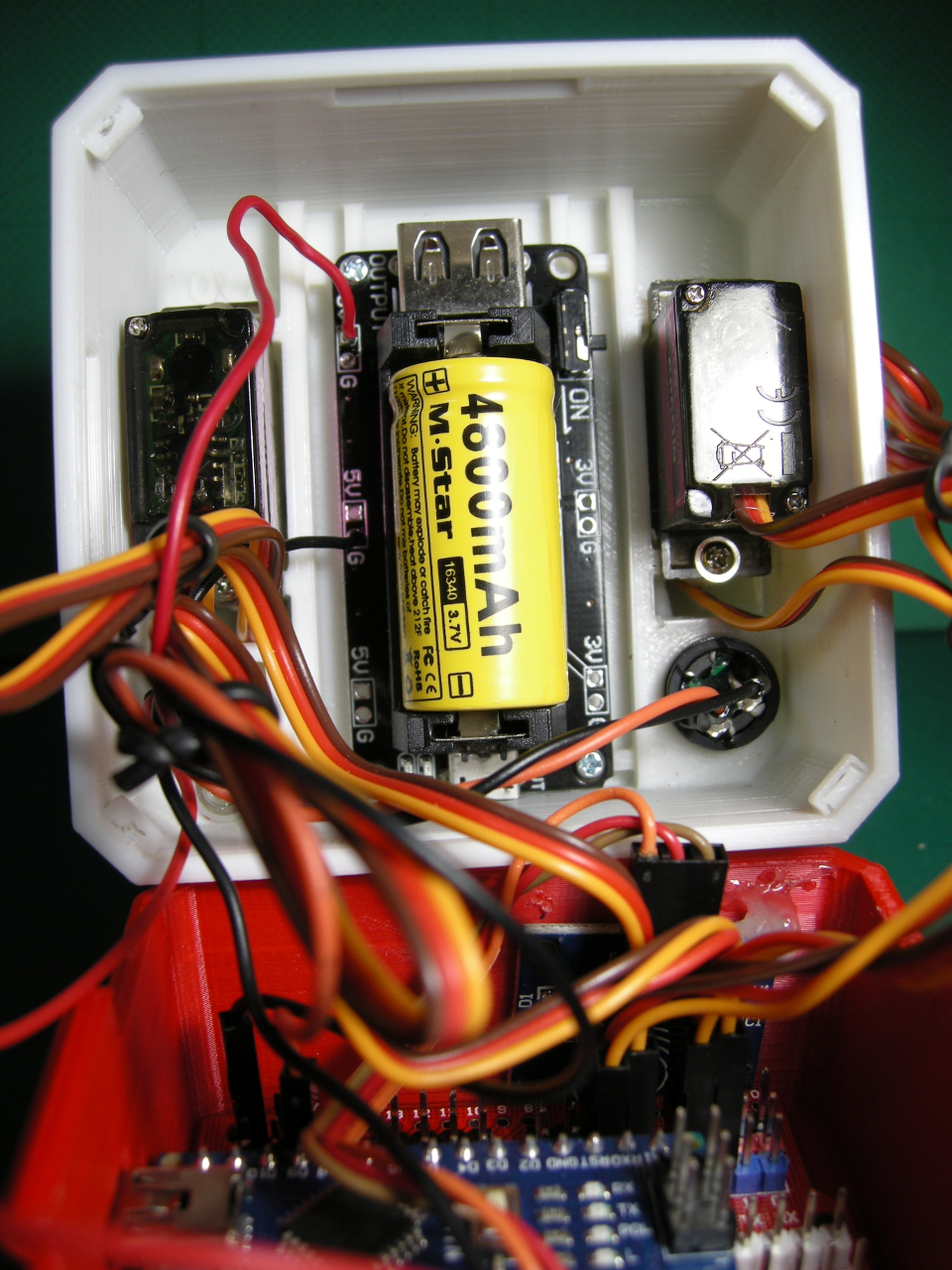
3.16340 充電式リチウム電池充電器シールドボードの設置
ボディに写真のようにセットしました。
4.ottoの組み立ては、製作マニュアルを参考にしてください。
これでottoを起動する準備が出来ました。